








Breaking News
 Gov Beshear Calls on McConnell to "Directly and Verbally Address the People of Kentucky"..
Gov Beshear Calls on McConnell to "Directly and Verbally Address the People of Kentucky"..
 Tech and the Vote to Intent Ratio
Tech and the Vote to Intent Ratio
 New Biden Tapes Reveal Hur's "Well-Meaning Elderly Man" Had An $8 Million Motive...
New Biden Tapes Reveal Hur's "Well-Meaning Elderly Man" Had An $8 Million Motive...
 Houthis Fire On Saudi Vessel, More Ships Make U-Turns, After 'MoU Revival' Hype Returns
Houthis Fire On Saudi Vessel, More Ships Make U-Turns, After 'MoU Revival' Hype Returns
Top Tech News
 Elon Vows AI-Made 'Odyssey' After Blasting Nolan's Take On Homer
Elon Vows AI-Made 'Odyssey' After Blasting Nolan's Take On Homer
 Anthropic is launching its own drug discovery programs for rare diseases using Claude...
Anthropic is launching its own drug discovery programs for rare diseases using Claude...
 SpaceX AI Satellites Will Have 250 Kilowatts of Power
SpaceX AI Satellites Will Have 250 Kilowatts of Power
 Chinese researchers have developed a sodium-metal battery that can fully charge in just 4 minutes...
Chinese researchers have developed a sodium-metal battery that can fully charge in just 4 minutes...
 SpaceX Starship Flight 13 in 3 Days - Thursday July 13
SpaceX Starship Flight 13 in 3 Days - Thursday July 13
 Chinese Scientists Develop Nuclear Battery Using Carbon-14
Chinese Scientists Develop Nuclear Battery Using Carbon-14
 Teleoperated humanoid robots complete first-ever live surgery
Teleoperated humanoid robots complete first-ever live surgery
 Floating capsule auto-disinfects water without chemicals or battery
Floating capsule auto-disinfects water without chemicals or battery
 Modular Reactors To Solve Data Center Hysteria?
Modular Reactors To Solve Data Center Hysteria?
 DeepSeek Developing In-House AI Chip In Bid To Cut Nvidia Reliance
DeepSeek Developing In-House AI Chip In Bid To Cut Nvidia Reliance


Salto the jumping robot can now execute stylish precision landings
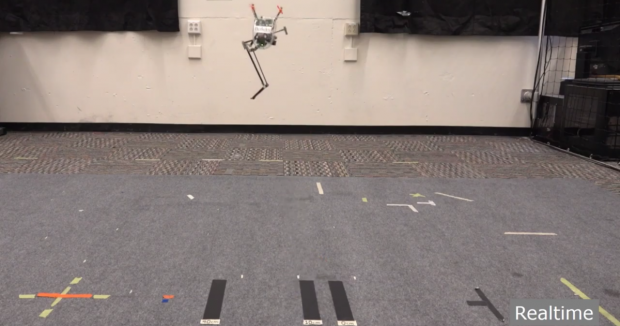
By 2018, it was hopping continuously to heights up to a meter (3.3 ft) or so, with pretty decent accuracy, and autonomously bouncing its way up obstacles, using chairs as stepping stones to bounce up onto a table, for example.
What it couldn't do, oddly enough, was land. It's one thing to keep a jigger like this dynamically in motion, but things need to be incredibly precise to stick the landing, especially when you don't have a second leg to step forward or back if you land at the wrong angle.
Indeed, angular momentum is the biggest bugbear for Salto to deal with, particularly when hopping forward from one spot to another. It leans forward as it jumps, using a rotating reaction wheel to balance, then adjusts the rotation of that balance wheel to bring its foot forward to the appropriate angle for a controlled landing. If its angular momentum is off, it might land its foot right on the target but then fall over.
Salto team lead Justin Yim explained the solution in an interview with IEEE Spectrum. "Falling from 1 meter (3 ft), Salto only has about 2.3 degrees of wiggle room forwards and backwards if it is to stick its landing. Gymnasts 'sticking a landing' with feet together face this same challenge. If their angular momentum is wrong, they have to take a step to keep their balance. However, taking a step isn't possible with only one leg (as Salto has) or when landing on a narrow ledge or beam. A person landing on a beam or ledge will pinwheel their arms the same way Salto spins its reaction wheel tail."